Зовнішні геодані в системах GPS моніторингу
Останнім часом все частіше обговорюється GPS моніторинг у аграрних сферах. І це не дивно, адже агрокомплекс — один із найактивніших користувачів різних систем моніторингу транспорту, палива, полів, переміщення врожаю та іншого. Тому з'являється дедалі більше різних систем моніторингу, орієнтованих агро сектор.
Сучасні програмні комплекси (звичайна назва ПЗ вже не підходить), дозволяють виконувати величезну кількість операцій, виводити звіти та аналітику, будувати графіки та інше. Розробники декларують неймовірну точність обчислень завдяки унікальним алгоритмам (машинне навчання, штучні інтелект і ось це все), але є важливий нюанс — точність кінцевих даних дуже залежить від точності, які програмні комплекси отримують з об'єктового обладнання (у нашому випадку це GPS трекери).
Практично повсюдно аграрії застосовують обладнання для точного землеробства, яке здатне працювати з дециметровою/сантиметровою похибкою, але при цьому в моніторингу зазвичай використовуються звичайні GPS трекери.
Виробники GPS трекерів застосовують ряд рішень для збільшення точності:
- одночасна робота з кількома навігаційними системами (GPS, GLONASS, GALILEO та інші)
- супер чутливі навігаційні модулі
- активні керамічні антени з хорошим коефіцієнтом посилення сигналу
- потужні обчислювальні здібності навігаційних модулів, які дозволяють виконувати різні алгоритми визначення/уточнення даних, у тому числі і за відображеними сигналами
- паралельна робота з мережами мобільного оператора (синхронізація часу не через навігаційні супутники, а через мережі мобільного оператора, що значно прискорює час «холодного» старту, а також надалі дозволяє надсилати дані хоч і без координат, але з тимчасовою прив'язкою)
- і багато іншого. Але все одно точність визначення координат для GPS трекерів залишається «метровою», що негативно впливає на «якість» «вихідних» даних у програмних комплексах.
Вирішення цього завдання вже придумано давно, але впроваджується лише провідними виробниками GPS обладнання. Розглянемо розв'язання задачі отримання точних координат у програмних комплексах на прикладі реалізації у трекерах BCE серії FMS500 (реалізовано у двох моделях, які мають RS232 інтерфейс, це моделі FMS500 Light+ та stCAN).
Як це працює?
У телематиці вже досить давно використовується стандарт обміну повідомленнями NMEA (National Marine Electronics Association), який, як видно з назви, перекочував в телематику з морського навігаційного обладнання. Використовуючи протокол NMEA, різні пристрої можуть обмінюватися даними про місцезнаходження (координати). Цей протокол дуже часто зустрічається в антенах та обладнанні точного землеробства. Інтерфейс обміну даними зазвичай використовується RS232 (хоча сучасне обладнання вже активно використовує ISOBus). Таким чином, для трекера необхідно:
- наявність інтерфейсу RS232
- підтримка протоколу NMEA
- внутрішні алгоритми, що дозволяють приймати координати в протоколі NMEA та підставляти їх у пакеті повідомлень, що надсилається на сервер моніторингу
- вміти переключатимуться на дані зі своєї антени, коли зовнішнє джерело координат не доступне.
Цей функціонал реалізував виробник BCE.
Налаштування
Як джерело зовнішніх даних використовуватимемо (барабанний дріб)… трекер Teltonika FMB125, який має RS232 інтерфейс, вміє видавати через нього дані в протоколі NMEA (але не вміє приймати дані із зовнішніх джерел у даному протоколі). На порт RS232 FMB125 підключаємо RS232 із трекера BCE FMS500 stCAN, проводимо необхідні налаштування.
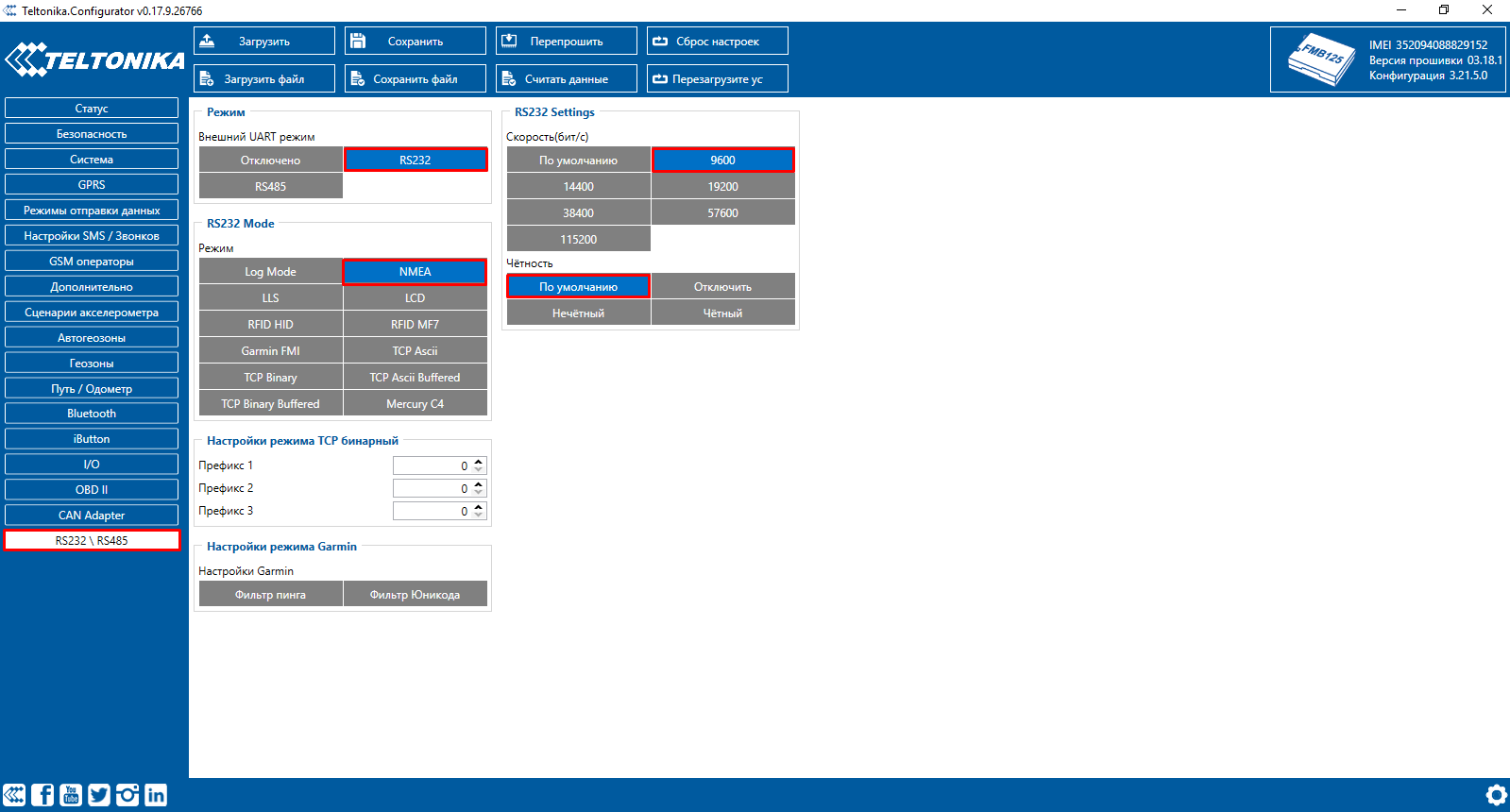
У цій конфігурації наявність зовнішніх даних контролюється цифровим входом (In2) і якщо даних (за фактом напруги) на in2 відсутні, трекер перемикається на внутрішню антену.
Варто звернути увагу, що:
- Джерело RS232 — Rx -> Tx — RS232 Приймач
- Джерело RS232 — Tx -> Rx — RS232 Приймач

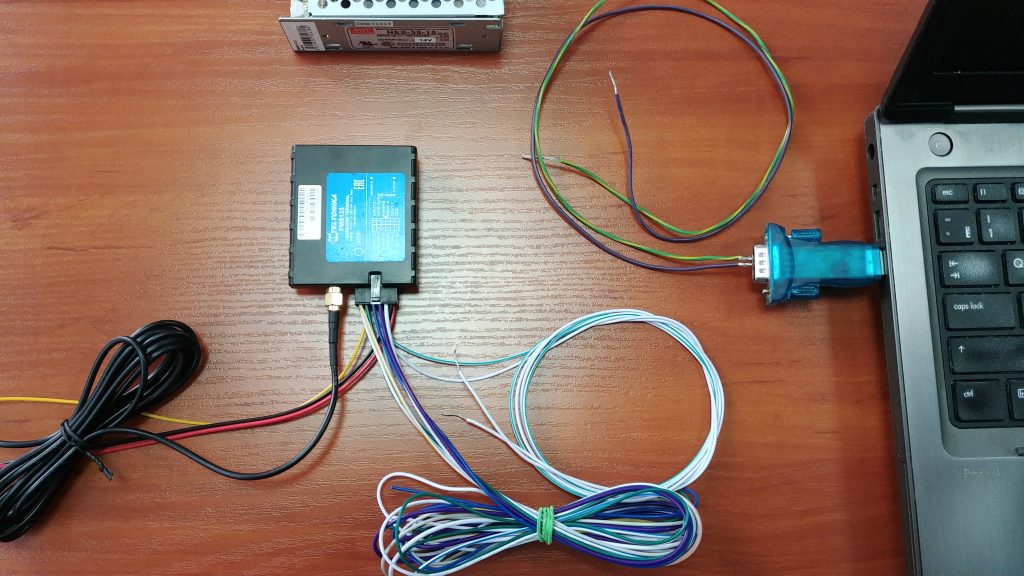
Працездатність джерела можна перевірити на ПК з COM-портом, або ноутбук з перетворювачем USB-COM (як у нашому випадку)
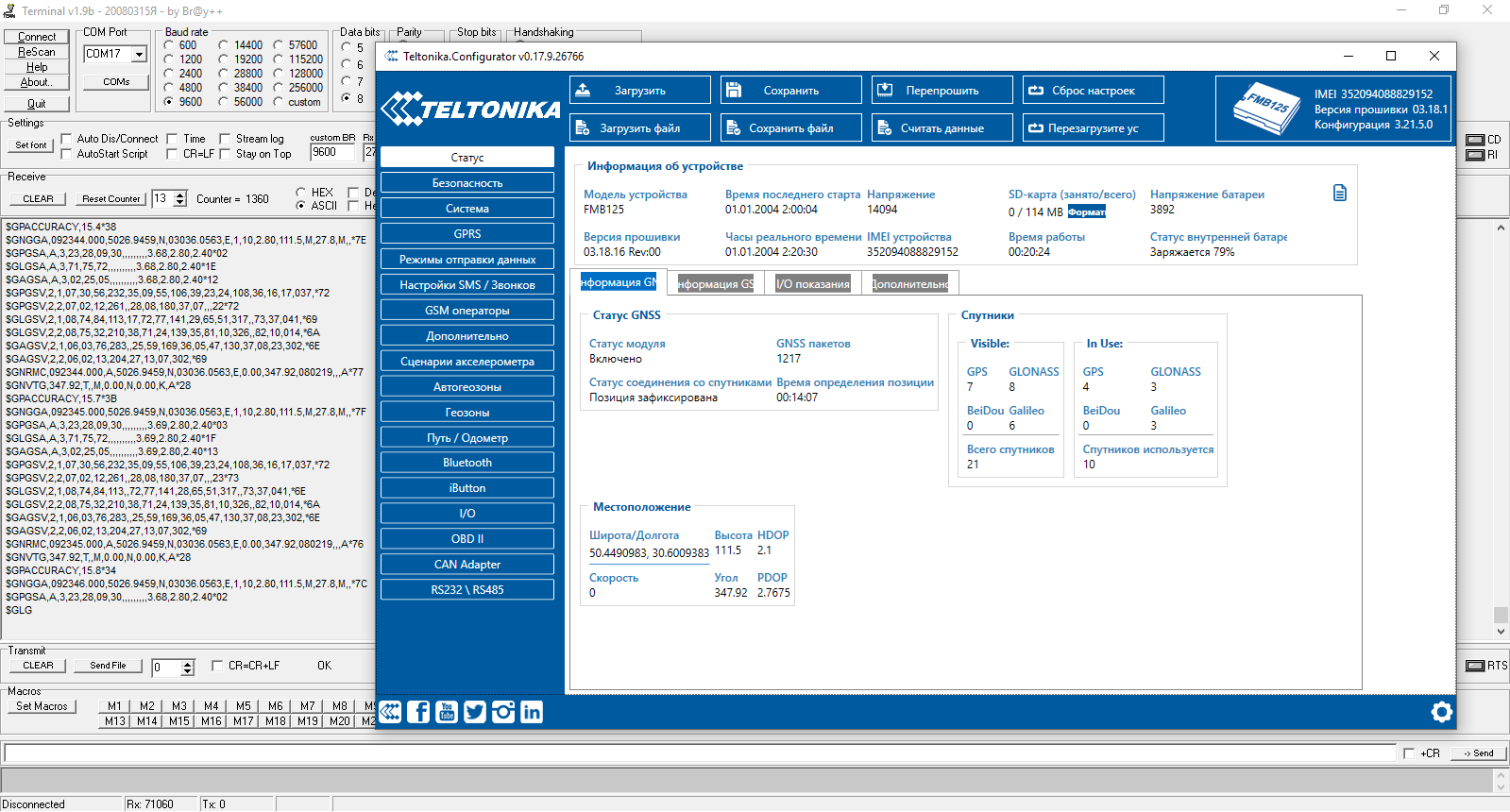
Джерело координат підключаємо до COM-порту, на ПК/ноутбуку запускаємо програму Terminal.exe (або будь-яку програму, здатну приймати та відображати дані по COM-порту). У терміналі повинні з'явитись дані, аналогічні на зображенні нижче.
Після відповідних підключень та налаштувань можна звірити дані в системі моніторингу від обох трекерів:
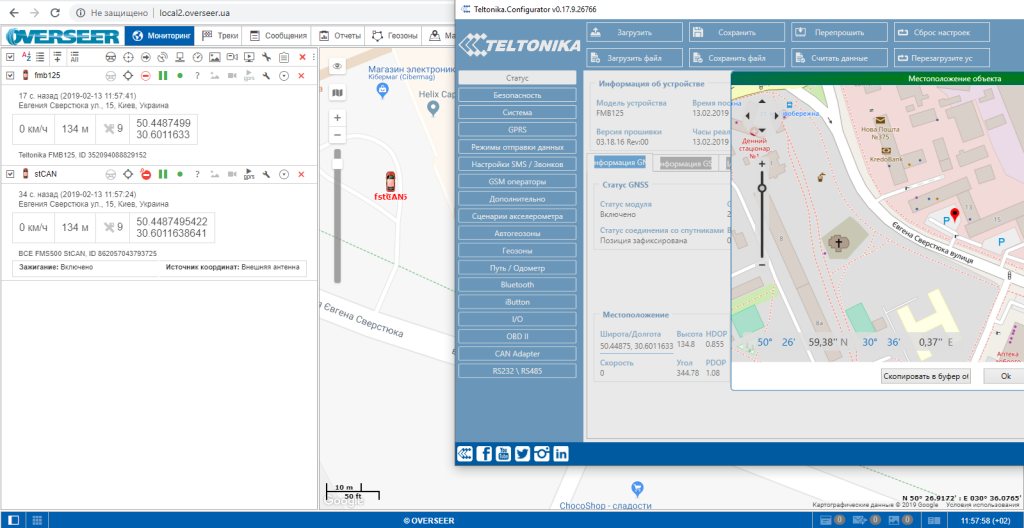
Дані за координатами трохи відрізняються - пов'язано з тим, що джерело постійно (з дискретністю 1 секунда) визначає положення, а з урахуванням похибки визначення - місце положення постійно змінюється (хоч і дуже незначне). Різниця визначення координат зображення вище 17 секунд.
Ще можна відзначити одне спостереження: кількість символів після точки визначення координат. Для трекерів BCE символів після точки – 10, для Teltonika – 7
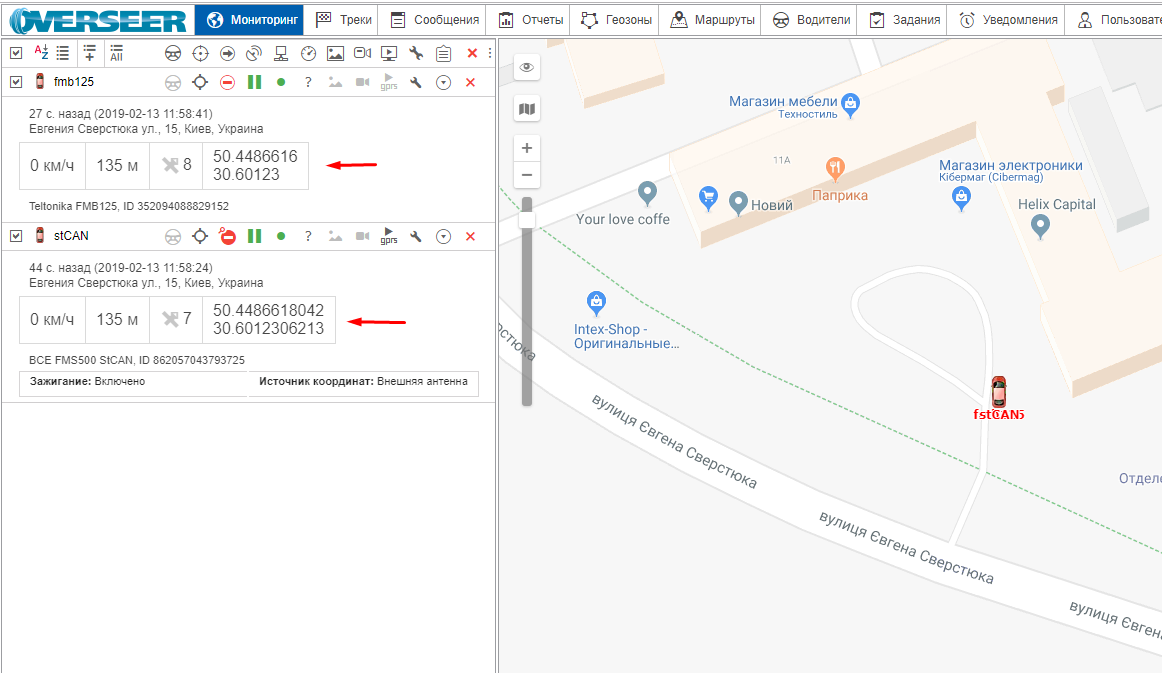
За нашими припущеннями це пов'язано з тим, що протокол Teltonika розроблявся значно раніше, ніж протокол BCE (на око протоколу років 12-15). І під час розробки протоколу не припускали, що може знадобитися «дециметрова» точна визначення координат. Але це лише теорія.
А що практика?
Перевіривши все «на столі», необхідно переміщатися «в поля», перевірити працездатність системи реальних умов реальному обладнанні. Чим ми найближчим часом займемося і обов'язково напишемо про це розгорнутий звіт.